# Overview
This repository contains the firmware for a custom-built automated electric armchair.
Detailed project information and documentation is available on the website:
- ~~V1: [Electric Armchair V1](https://pfusch.zone/electric-armchair)~~
- V2: [Electric Armchair V2](https://pfusch.zone/electric-armchair-v2)
**Note:** In the current version _V2.2_, only the esp-project in the [board_single/](board_single) folder and the custom libraries in [common/](common) are used.
The projects in the folders `board_control/` and `board_motorctl/` are no longer compatible and are legacy from _V2.1_.
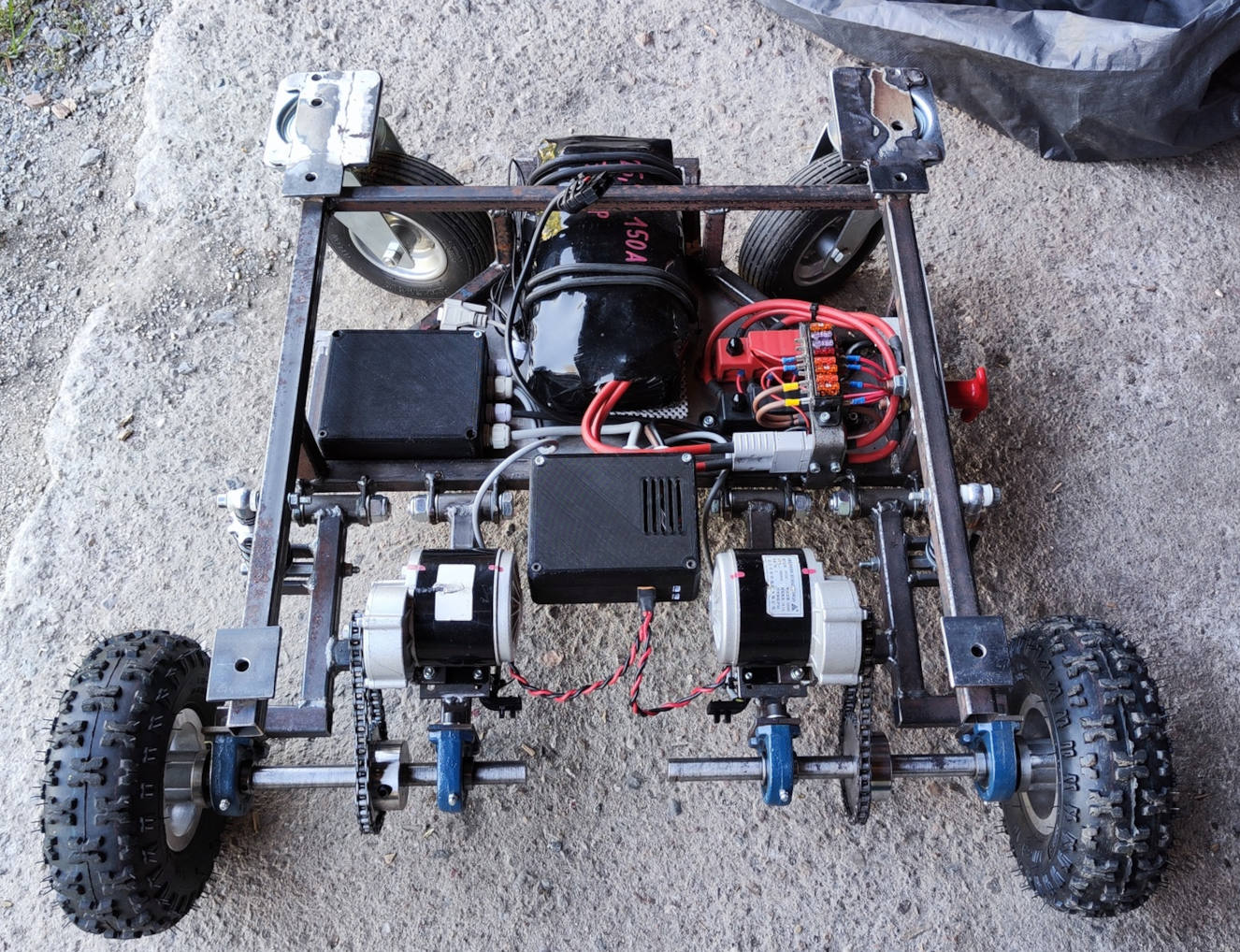
*Photo of the built frame that carries the armchair*
# Overview
## Current Features
- **Control Modes:**
- **Joystick:** Control movement via hardware joystick mounted on the right armrest
- **HTTP:** Control movement via virtual joystick on a web interface
- **Massage:** Armchair shaking depending on stick position
- **Adjust:** Control leg and backrest position via joystick
- **Auto:** Execute stored driving commands sequentially
- **Advanced Motor Control:**
- Deceleration limit
- Acceleration limit
- Current limit
- Braking
- Compatible with different motor drivers:
- 3 pins: A, B, PWM - e.g. various common H-Bridges
- 1 pin: UART/RS232 - e.g. Sabertooth
- **Input/Sensors:**
- **Speed Measurement:** Measures speed and direction of each tire individually using custom built encoders
- **Current Measurement:** Monitors current of each motor
- **Battery Voltage:** Measures battery voltage and calculates percentage according to discharge curve
- **Analog Joystick:**
- Evaluate two analog signals to get coordinates, radius and angle
- Calibration wizard/sequence
- Calibration stored persistently in nvs
- **Fan Control:** Cooling fan for motor driver are activated when needed only
- **Buzzer:** Provides acoustic feedback when switching modes or interacting with menu
- **OLED-Display + Rotary-encoder:**
- Various status screens showing battery status, speed, RPM, motor current, mode, power, duty cycle, stick data
- Menu for setting various options using encoder
- Changed settings are stored persistently in NVS flash
- Menu for selecting the control mode
- **UART Communication between 2 Boards (V2.1)**
- **Electric Chair Adjustment:** Control 4 Relays powering motors that adjust the chair rest positions
- **Wi-Fi:**
- Hosts wireless network
- Webserver with webroot in SPIFFS
- HTTP API for controlling the chair (remote control)
- **React web-app:** Virtual joystick sending data to http-API (placed in SPIFFS)
## Planned Features
#### Hardware
- More Sensors:
- Accelerometer
- Lidar sensor / collision detection
- GPS receiver
- Temperature sensors
- Lights
- Camera
#### Algorithms
- Anti-Slip Regulation
- Self-Driving Algorithm
#### UI
- Improved Web Interface
- Settings
- Chair adjustment
- Simple App
## Hardware Setup / Electrical
### PCB
The firmware is designed for an ESP32 microcontroller integrated into a custom PCB developed here: [Project Work 2020](https://pfusch.zone/project-work-2020)
### Connection Plan
A detailed diagram illustrating all components and wiring can be found in the file [connection-plan.drawio.pdf](connection-plan.drawio.pdf).
For more details refer to the documentation on the [website](https://pfusch.zone/electric-armchair-v2).
# Installation
### Install ESP-IDF
For this project **ESP-IDF v4.4.4** is required
```bash
#download esp-idf
yay -S esp-idf #alternatively clone the esp-idf repository from github
#run installation script in installed folder
/opt/esp-idf/install.sh
```
### Clone Repository
```
git clone git@github.com:Jonny999999/armchair_fw
```
### Install Node Packages
Navigate to the react-app directory and install required packages using npm:
```
cd react-app
npm install
```
# Building the Project
## React-webapp
When flashing to the ESP32, the files in the `react-app/build/` folder are written to a SPIFFS partition.
These files are then served via HTTP in the Wi-Fi network "armchair" created by the ESP32.
Initially, or when changing the React code, you need to manually build the React app:
```bash
cd react-app
#compile
npm run build
#remove unwanted license file (filename too long for spiffs)
rm build/static/js/main.8f9aec76.js.LICENSE.txt
```
**Note:** For testing the app locally, use `npm start`
## Firmware
### Environment Setup
```bash
source /opt/esp-idf/export.sh
```
Run once per terminal
### Compilation
```bash
cd board_single
idf.py build
```
### Upload
- Connect FTDI programmer to board (GND to GND, TX to RX, RX to TX)
- Press RESET and BOOT button
- Release RESET button (keep pressing boot)
- Release boot button
- Run flash command:
```bash
idf.py flash
```
### Monitor
To view log output for debugging, follow the same steps as in the Upload section, but run:
```bash
idf.py monitor
```
# Usage / User Interface
## Encoder Functions
**When not in MENU mode**, the button (encoder click) has the following functions:
| Count | Type | Action | Description |
|-------|---------------|----------------------|---------------------------------------------------------------------------------------------|
| 1x long | switch mode | **MENU_MODE_SELECT** | Open menu for selecting the current control mode |
| 1x | control | [MASSAGE] **freeze** input | When in massage mode: lock or unlock joystick input at current position. |
| 1x short, 1x long | switch mode | **ADJUST-CHAIR** | Switch to mode where the armchair leg and backrest are controlled via joystick. |
| 2x | toggle mode | **IDLE** <=> previous| Enable/disable chair armchair (e.g., enable after startup or switch to previous mode after timeout). |
| 3x | switch mode | **JOYSTICK** | Switch to JOYSTICK mode, to control armchair using joystick (default). |
| 4x | switch mode | **HTTP** | Switch to **remote control** via web-app `http://191.168.4.1` in wifi `armchair`. |
| 5x | switch mode | **MENU_SETTINGS** | Open menu to set various options, controlled via display and rotary encoder. |
| 6x | switch mode | **MASSAGE** | Switch to MASSAGE mode where armchair shakes differently, depending on joystick position. |
| 7x | | | |
| 8x | toggle option| **deceleration limit** | Disable/enable deceleration limit (default on) => more responsive. |
| 12x | toggle option| **alt stick mapping** | Toggle between default and alternative stick mapping (reverse direction swapped). |
**When in MENU_SETTINGS mode** (5x click), the encoder controls the settings menu: (similar in MENU_MODE_SELECT)
| Encoder Event | Current Menu | Action |
|---------------|--------------|--------------------------------------------------------------|
| long press | main-menu | Exit MENU mode to previous control mode (e.g., JOYSTICK). |
| long press | value-select | Exit to main-menu without changing the value. |
| click | main-menu | Select currently highlighted menu item -> enter value-select screen. |
| click | value-select | Confirm value / run action. |
| rotate | main-menu | Scroll through menu items. |
| rotate | value-select | Change value. |
## HTTP Mode
Control the armchair via a virtual joystick on the web interface.
**Usage:**
- Switch to HTTP mode (4 button presses or via mode-select menu).
- Connect to WiFi `armchair`, no password.
- Access http://192.168.4.1 (note: **http** NOT https, some browsers automatically add https!).